Ардупилот
Unlock Professional-Grade Autonomy: Why Ardupilot is the Industry StandardWhether you are building a long-range survey rig or an autonomous depth-mapping boat, Ardupilot remains the most versatile and trusted open-source autopilot ecosystem. Unlike racing-focused firmware, Ardupilot provides the reliability required for complex autonomous flight, VTOL transitions, and professional UAV operations.
Характеристика
ArduCopter / ArduPlane
Hardware Compatibility
Primary Language
C++
Cube Orange, Pixhawk, SpeedyBee F405
Mission Capabilities
Auto-Waypoints, RTL, VTOL
Over 100+ supported boards
Telemetry Protocol
MAVLink
Crossfire, DragonLink, SiK Radio
Max Altitude
Limitless (Hardware Dependent)
Barometer & GPS integrated
Engineering Analysis: Solving Real-World Implementation Hurdles
Transitioning from Betaflight to Ardupilot can feel overwhelming due to the sheer volume of parameters. As a senior engineer, I often see pilots struggling with yaw drift issues on larger 9-inch frames using the SpeedyBee F405 v3 stack. This is frequently a vibration isolation or compass calibration issue rather than a firmware bug. If you’re seeing a GPS calibration loop where it resets from 99% to 0%, check your TX/RX wiring and ensure you have a clear view of the sky; Ardupilot is much more stringent about GPS health than hobby-grade firmware.
For those exploring simulation, a common frustration is the “bad GPS health” error when trying to arm in Mission Planner via Xplane. This usually stems from a mismatch in HIL (Hardware-In-the-Loop) settings. Safety is also paramount; if you’re building a custom safety switch, ensure you are mapping the correct I/O pins to clear the safety check before takeoff. If your browser flags an Ardupilot download or Mission Planner as a virus, it is typically a false positive—always verify your source via the official Ardupilot GitHub. For the latest hardware to support these complex builds, check out our New FPV Arrivals and stock up on essential Drone Tools for your bench.
Frequently Asked Questions
What is the use of ArduPilot?
Originally developed for model aircraft, Ardupilot has evolved into a full-featured autopilot used by research organizations and militaries for autonomous flight, surveying, and rover operations.
Which is better, PX4 or ArduPilot?
PX4 is often preferred for academic research and low-latency precision, while Ardupilot is widely considered superior for long-range reliability and its massive feature set for diverse vehicle types.
Is Pixhawk a flight controller?
Yes, Pixhawk is an open-hardware flight controller standard that supports both Ardupilot and PX4 firmware. The Cube Orange is a popular modern iteration of the Pixhawk standard.
What is the difference between Betaflight and ArduPilot?
Choose Betaflight for high-performance FPV racing and freestyle. Choose Ardupilot for autonomous missions, GPS-heavy navigation, and professional UAV systems where reliability is more important than flip-speed.
Can ArduPilot control a boat?
Absolutely. By setting the FRAME_CLASS parameter to 2, the Rover firmware optimizes for boats, allowing for autonomous depth mapping and water-based missions.
What programming language does ArduPilot use?
Ardupilot is primarily written in C++, which allows it to remain efficient across various hardware architectures while supporting complex sensor fusion.
- Ардупилот
HappyModel Ardupilot Arduplane PITOT Digital AirSpeed Meter Sensor Tube for Pixhawk PX4 Flight Controller RC Multirotor Airplane
Диапазон цен: $40.16 - $41.38 - Ардупилот
Ardupilot APM2.8 Flight Controller 2.8 APM V2.8.0 FC without Compass+M8N GPS For RC FPV Multicopter Airplane Quadcopter Drone
Диапазон цен: $65.93 - $99.27 - Ардупилот
MATEK F405-MiniTE – 20X20mm 30X30mm MATEK F405-MiniTE OSD Baro Blackbox F405 Flight Controller ArduPilot INAV BetaFlight for RC FPV Airplane Drone
Диапазон цен: $76.62 - $143.47 - Ардупилот
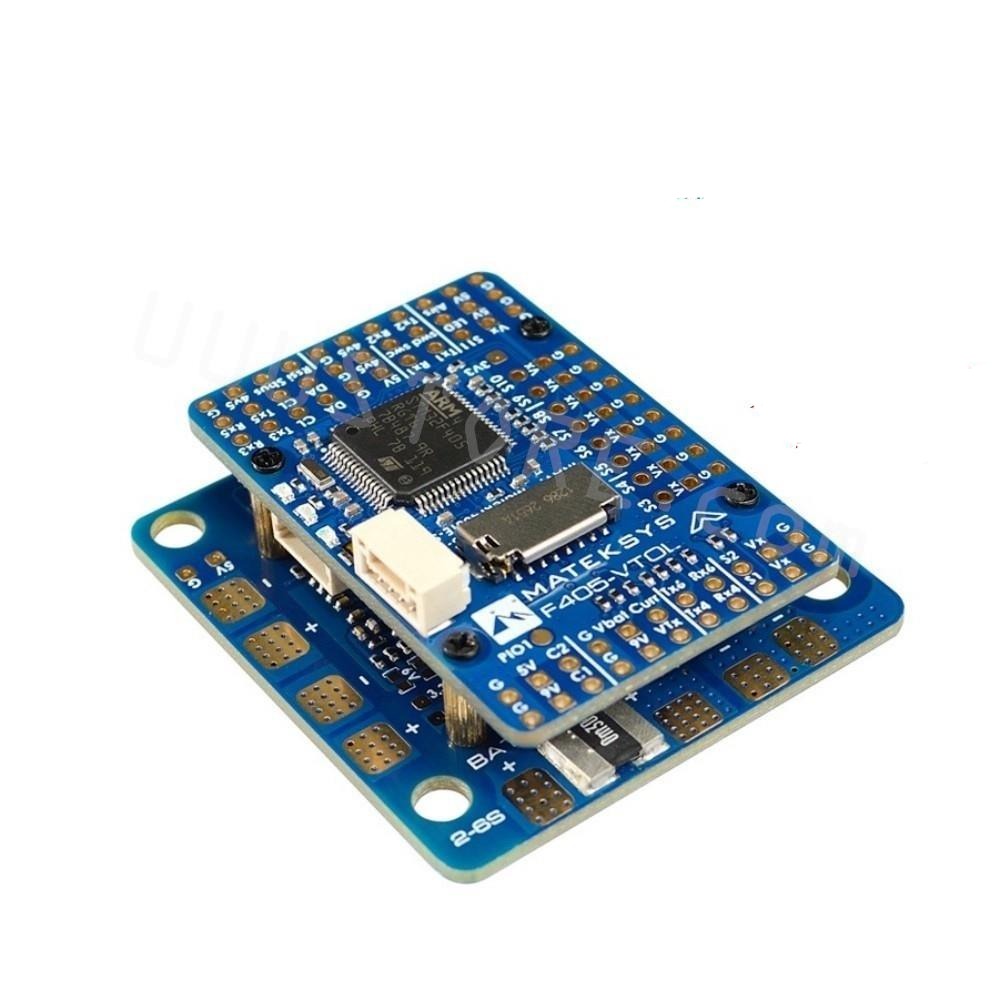
MATEK F405-VTOL Flight Controller – Baro OSD MicroSD Card Blackbox 2-6S LiPo ArduPilot INAV for RC Multirotor Fixed-Wing Airplane
Диапазон цен: $83.29 - $154.16 - Ардупилот
APM2.8 APM 2.8 flight controller Ardupilot +M8N GPS built-in compass +gps stand+shock absorber for RC Quadcopter Multicopter
Диапазон цен: $104.90 - $116.04 - Ардупилот
Pixhawk PX4 PIX 2.4.8 32 Bit Flight Controller – Autopilot with 4G SD Safety Switch Buzzer PPM I2C RC Quadcopter Ardupilot
Диапазон цен: $130.64 - $460.53 - Ардупилот
CUAV NEO 3 U-BLOX GNSS GPS Module – PIX Flight Controller Pixhawk With Ardupilot PX4 Open Source Pro GPS
Диапазон цен: $153.52 - $256.13 - Ардупилот
PIXHAWK2.4.8 Flight Control Carbon Fiber 450 Frame Kit – Ardupilot 100MW Radio Telemetry Quadcopter BLHELI 20A 2212 Motor ESC
Диапазон цен: $311.80 - $541.38 - Ардупилот
SIYI N7 Автопилот Контроллер Полета - Совместимость с Ardupilot и PX4 Ecosystem M9N GPS и 2 до 14S модуль питания для беспилотного летательного аппарата
Диапазон цен: $338.16 - $386.99 - Ардупилот
Автопилот CUAV Pixhawk V6X PX4 Ardupilot Flight Controller - STM32H753IIK6 Processor RM3100 Compass Customize Carrier Board and Core With NEO 3 Pro
Диапазон цен: $393.37 - $595.43 - Ардупилот
CUAV NEW X7+ Flight Controller NEO 3 Pro GPS Pixhawk Open Source PX4 ArduPilot GNSS FPV RC Drone VTOL Quadcopter Combo
Диапазон цен: $680.67 - $934.63