









المواصفات
اسم العلامة التجارية: فيتيك
المنشأ: البر الرئيسي للصين
المواد: بلاستيك
نوع البلاستيك: كمبيوتر شخصي
قطع غيار السيارات والمركبات: البطاريات - LiPo
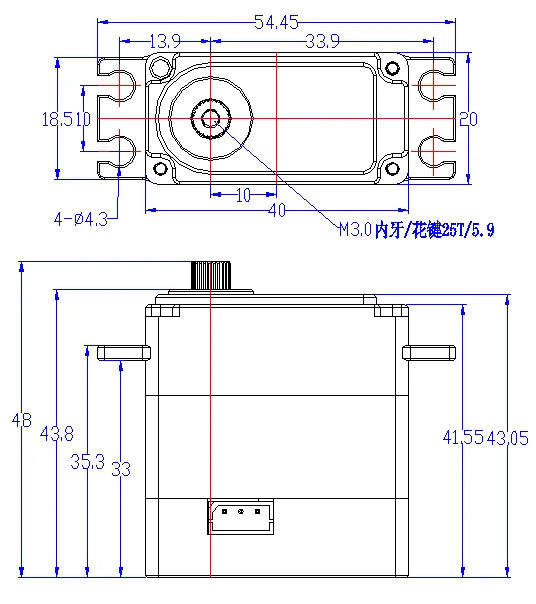
الحجم: 40 X 20 X 43.05 mm
لنوع المركبة: السيارات
الاستخدام: المركبات وألعاب التحكم عن بعد
ترقية قطع الغيار/الإكسسوارات: بطارية ليثيوم
الأجهزة الطرفية/الأجهزة الطرفية للتحكم عن بُعد: وحدة التحكم عن بُعد
مستلزمات الأدوات: البطارية
الكمية: 1 قطعة
المعايير الفنية: KV1100
رقم الموديل: 40mm X 20mm X 43.05mm
سمات الدفع الرباعي: المحركات
قاعدة العجلات: البراغي
رقم الموديل: ST-3046-C001
الحجم: 40 X 20 X 43.05mm
الوزن: 89± 1g
نوع الترس: steel Gear
الزاوية الحدية: لا يوجد حد
المحمل: المحامل الكروية
محور دوران ترس القرن: 25T/OD5.9mm
المحرك: محرك بدون فرشاة
Case: Aluminium
ذروة عزم دوران المماطلة: [email protected]
عزم الدوران المقدر: [email protected]
نوع البروتوكول: اتصال تسلسلي غير متزامن نصف مزدوج الإرسال غير المتزامن
ST-3046-C001 is 6V 40kg serial bus smart servo,adopt full aluminum alloy case、coreless motor、steel gearbox、coreless motor, Feetech self researched and developed TTL control board,12 bit high precision magnetic coding sensor. The stall torque is 40kg.cm, can feedback position、speed、voltage、current、temperature、load parameters,thus, overload and over-current protection can be realized. It is suitable for application in industrial equipment, robot and transmission application scenarios.
SKU:STS3046
Product Name:7.4V 40KG.CM Plastic Case Metal Gear Magnetic Encoder Single shaft TTL Serial Bus Servo
Appearance size:45.2X24.7X35mm(See the blueprint)
Stall Torque:[email protected]
Stall Speed:[email protected]
Feedback: load / position / speed / voltage / current / temperature
Electronic protection: overheat / overcurrent / overvoltage / overload protection





الميزات الهيكلية:
يعتمد الغلاف على غلاف بلاستيكي هندسي مع قوة أعلى , تحسين المسافة المركزية , هيكل عام أكثر إحكاما , يعتمد ترس المؤازرة 1:345 تركيبة تروس نحاسية , عزم دوران أعلى , في نفس عزم الدوران , مقارنةً بحجم المؤازرة القياسي , يبدو أقل (5 مم))، يعتمد الهيكل على تصميم هيكل المحور المزدوج , الخصائص الهيكلية للدائرة المبطنة الصلبة , وضع الأسلاك للكابلات الصادرة المزدوجة مع قرون مؤازرة النائب الرئيسي المعدني , إنه مناسب للتطبيق في الروبوت رباعي الأرجل، روبوت الثعبان، روبوت سطح المكتب، الروبوت الشبيه بالإنسان والذراع الميكانيكية.
وظيفة التحكم الإلكتروني : وظيفة التحكم الإلكتروني :
1- وظيفة إيقاف بدء التسارع: يمكن ضبط السرعة وقيمة التسارع، ويكون تأثير الحركة أكثر لطفًا.
2- دقة عالية، دقة الموضع المطلق 360 درجة 4096 بت، أعلى دقة للموضع هي 0.088 درجة، إذا كان التحكم 90 درجة، فإن الإدخال 4096 / 360 * 90 = 1024، إذا كان التحكم 180 درجة، فإن الإدخال 4096 / 360 * 180 = 2048، وذلك لحساب.
3- هناك أربعة تبديل لأوضاع العمل (الوضع 0 مؤازرة الموضع، والوضع 1 سرعة الحلقة المغلقة، والوضع 2 سرعة الحلقة المفتوحة، والوضع 3 مؤازرة الخطوة).
1) 、 الوضع 0 、 وضع تحديد الموقع، الوضع الافتراضي. في هذا الوضع، يمكن التحكم في الزاوية المطلقة بزاوية 360 درجة. دعم حركة التسارع.
2)、الوضع 1 、الوضع 1 、السرعة حلقة مغلقة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 1، والتبديل إلى وضع الحلقة المغلقة السرعة، وإدخال السرعة المقابلة في عمود السرعة للتشغيل.
3)、الوضع 2 、الوضع 2 、السرعة مفتوحة الحلقة، في واجهة البرمجة، يتم ضبط وضع التشغيل على 2، والتبديل إلى وضع الحلقة المفتوحة السرعة، وإدخال الوقت المقابل في عمود الوقت للتشغيل.
4) 、الوضع 3 、 وضع الخطوة: في واجهة البرمجة، يتم ضبط الحد الأقصى/الأدنى للزاوية على 0، ويتم ضبط وضع التشغيل على 3. قم بالتبديل إلى وضع الخطوة. أدخل الموضع في شريط الموضع للتدرج نحو الموضع المستهدف. انقر فوق الموضع مرة أخرى لمواصلة التقدم في نفس الاتجاه.
4 、 وضع الدوران المتعدد، التحكم المطلق بزاوية 360 درجة والتغذية الراجعة، في ظل أعلى دقة، يمكن أن يكون التحكم في الموضع المطلق زائد أو ناقص 7 دورات، ولكن لا يتم حفظ عدد دورات الطاقة، يتم الاحتفاظ فقط بقيمة التغذية الراجعة للموضع المطلق.
5 、 معايرة مفتاح واحد، تركيب بزاوية 360 درجة في أي موضع، (40 (عشري) إدخال عنوان 128 (عشري)) مفتاح واحد تصحيح الوضع الحالي هو الوسط (2048 (عشري)).
6 、 مستوى اتصال 6 、TTL، واتصال غير متزامن نصف مزدوج، ودعم بروتوكول الناقل لضبط معلمات القراءة والكتابة، وإضافة وظيفة القراءة المتزامنة (إرسال تعليمات لتلقي تعليمات إعادة القراءة من كل مؤازر على الناقل بدوره).
7 、 حماية متعددة، (الحمل الزائد، التيار الزائد، الجهد الزائد، السخونة الزائدة، إعداد المفتاح، تغيير معلمة الحالة)
1) 、 الحماية من التحميل الزائد: من خلال اكتشاف الموضع، أثناء الحركة من موضع البدء إلى الموضع المستهدف، عندما يتم اكتشاف أن الموضع الحالي ليس الموضع المستهدف بعد مواجهة حجب العوائق، تستمر قوة التفريغ لمدة 2S (20% من قوة الحجب الافتراضية). إلى أن يتم تشغيل أمر جديد، يتم تحرير الحماية من التفريغ
2) 、 حماية التيار الزائد: من خلال القيمة الحالية المحددة، تحقق مما إذا كان التيار يصل إلى القيمة الحالية المحددة. عندما يصل إلى القيمة الحالية المحددة، حرر القوة (عزم الدوران الافتراضي هو 0). حتى يتم تشغيل أمر جديد، حرر الحماية من التيار الزائد
3) 、 3) 、 الحماية من الجهد الزائد: اكتشف قيمة الجهد الحالي. إذا تجاوزت قيمة الجهد المحددة، سيعرض الإنذار الجهد الزائد.
4) 、 4) 、 الحماية من الحرارة الزائدة: الكشف عن درجة حرارة المحرك الحالية. إذا تجاوزت درجة الحرارة القيمة المحددة، سيعرض الإنذار ارتفاع درجة الحرارة.
8 :ملاحظات متعددة:
1) تغذية مرتجعة للحمل: يحرك خرج التحكم الحالي دورة عمل الجهد للمحرك، والمقياس الكامل هو 1000 = 100% خرج عزم الدوران.
2) التغذية الراجعة الحالية: تيار عمل المؤازرة، 1 = 6.5mA
3) التغذية الراجعة للجهد: جهد عمل المؤازرة، 70 = 7 فولت , 0.1 فولت
4) التغذية المرتدة لدرجة الحرارة: درجة حرارة العمل الداخلية للمؤازرة الحالية (قياس درجة الحرارة)؛。
5) تغذية راجعة للسرعة: تغذية راجعة لسرعة دوران المحرك الحالي، وعدد الخطوات في وحدة الزمن (في الثانية)

2- سلك المؤازرة
3-التعبئة: كيس بولي ايثيلين البولي ايثيلين ، صندوق ألوان ، صندوق بلاستيك ويتي
شعارك
4- موصل الكابل
5.Customized Various wide working voltage servo
9 、 9 、 فتح معلمات PID.
